OpenCoord需要進行版本更新,按照原先的規劃,更新的內容是框架和歷元轉換,EGM2008的讀取。EGM2008的讀取準備直接使用 開源 庫geographiclib,由于現在有替代程序可以使用,不著急,留待以后有稍微大片的時間再更新。相對而言,框架和歷元的轉換更新優先級高一些。以前收集了一些資料,比較重要有2篇論文,作為本次更新的理論基礎。
1、ITRF框架的相互轉化, 劉?立,成英燕
ITRF地球參考框架是目前精度更高、穩定性更好的參考框架,ITRF是利用全球測站觀測資料成果推算所得到的地心坐標系統,確切地說, ITRF是一個四維地心坐標參考框架,除了空間直角坐標形式的坐標外,還給出了臺站的漂移速度,其坐標精度為毫米級至厘米級。
理論上講, ITRF系列所對應的地球平極和平均格林尼治子午線應該是重合的,但ITRF參考站是通過觀測獲得的,由于觀測手段和觀測精度的不同,各個系統之間有微小的差別。但不同的ITRF框架可以通過坐標系之間的相似變換進行轉換。通常,ITRF轉換使用14個轉換參數,即7個轉換參數加上7個轉換參數速率,這14個轉換參數是由布爾莎-沃爾夫七參數得到的 。從ITRF2000轉換到以前框架的轉換參數與速率可以從網上( ftp: / / itrf.ign. fr /pub / itrf / ITRF. TP)獲得。


添加微信好友, 獲取更多信息
復制微信號
轉換步驟:
(1)統一歷元

(2)框架轉換

字母頭上帶點的是其速度。
2、ITRF 框架坐標轉換問題的研究,尹偉言 ,趙鑫
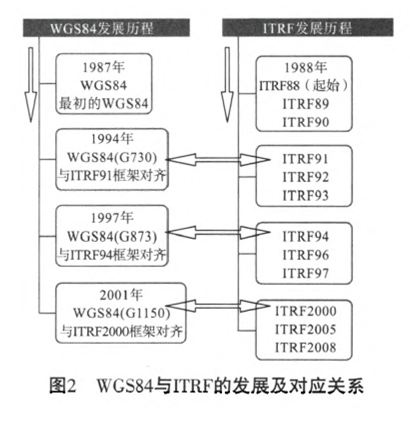
簡言之,ITRF是通過一組固定于地球表面且只做線性運動的大地點的坐標及坐標變化速率組成的。迄今為止,IERS已發布了ITRF88、ITRF89、ITRF90、ITRF91、ITRF92、ITRF93 、ITRF94 、ITRF96 、ITRF97 、ITRF2000 、ITRF2005、ITRF2008 這12 個版本。ITRF 隨技術水平的提高、全球分布站的數量和并置站的增加以及新的測量手段的加入而不斷精化。后面建立的ITRF框架之間的差別越來越小,目前達到了毫米級精度。
由于板塊運動,不同時期同一參考站的位置發生了變化,而且不同參考框架下參考站的位置也不一樣。因此在處理不同時期不同參考框架的數據時,應需進行框架轉換和歷元轉換[2]。我國目前所采用的是CGCS2000 坐標系,而所使用的精密星歷是IGS2008框架,歷元為觀測當天的瞬時歷元,那么計算的結果便是ITRF2008 框架,觀測當天的歷元,需要通過歷元轉換和框架轉換,將其轉換成ITRF97 框架,歷元2000.0,轉換后的坐標便可以認為是CGCS2000 坐標系下的。
轉換 ***
轉換一般有兩種思路,一種是先進行歷元轉換,再進行框架轉換;另一種是先進行框架轉換,再進行歷元轉換。從理論上講,兩種 *** 得到的結果應該是一致的。文獻[2]和文獻[4]均對ITRF 框架坐標轉換 *** 進行了一定的介紹,但并不全面,而且有些歷元參數不是很清楚且容易搞混,因此筆者在此基礎上略加修改,使轉換過程及結果更加清晰且容易理解。下面具體介紹一下轉換的 *** 。

先轉換框架再轉換歷元,不僅不知道觀測時速度,而且較為繁瑣且降低了精度,因此最常用的還是先轉換歷元,再轉換框架。
(1)歷元轉換
由于地殼運動,GPS 測站在框架內的位置隨時間而變化,這種運動一般比較緩慢,可近似為勻速線性運動,因此某歷元的坐標計算公式可表示為:

(2)框架轉換、
根據ITRFxx框架與ITRFyy 框架之間的14 個轉換參數,按照BURSA 七參數坐標轉換模型進行轉換。7個轉換參數并不是固定不變的,在任意時刻的7 個參數需要考慮變化速率,因此首先要解算出T2 歷元兩個框架之間的7 個轉換參數,其公式為:

式中,T 為三個平移量,D 為一個尺度因子,R 為三個旋轉量。



ppb=10負9次方,mas,毫角秒
ITRF2014至其它框架轉換參數